En el marco del proyecto SPGIC (Sistema de Posicionament Geodèsic Integrat de Catalunya) se ha desarrollado el servicio RTKAT. Este sistema está basado sobre la red CATNET de estaciones permanentes GPS de Catalunya, que durante doce años ha soportado el servicio de posicionamiento RASANT y el servicio de provisión de datos para post proceso GeoFons.
El servicio GeoFons se inició en 1994 soportado en un sistema BBS (Bulletin Board System) de acceso telefónico vía módem, única tecnología en esos momentos accesible a la mayoría de usuarios que permitía mantener un repositorio de datos de acceso público. En el momento en que la red Internet dejó de ser una herramienta de uso casi exclusivo en el entorno universitario, científico e institucional, y se convirtió en una herramienta de acceso al público profesional, el ICC apostó por mejorar su servicio e implementar el servicio de ficheros para post proceso en un repositorio accesible por ftp (de la misma manera se hizo con el servicio de reseñas de los vértices de la red utilitaria y con el resto de datos geodésicos disponibles).
Con la vista puesta en los organismos internacionales que lideran los avances en el posicionamiento y la geodesia, y siguiendo sus directrices en cuanto a las configuraciones e infraestructura de las estaciones, el ICC ha hecho el esfuerzo de configurar unos servicios de comunicaciones en tiempo real que a medio plazo le permitiera implementar los nuevos servicios de posicionamiento basados en solución de red.
El sistema de comunicaciones VSAT ha permitido ofrecer un servicio de ficheros para el post proceso con publicación inmediata durante muchos años, disponer de estaciones en emplazamientos de interés estratégico y geodinámico sin depender de la infraestructura de telefonía convencional, así como participar en proyectos pilotos como el EUREF-IP y el WARTK. En base a toda esta experiencia el ICC ha adquirido plena capacidad para ofrecer un servicio de posicionamiento de precisión en tiempo real con solución de red.
En Febrero de 2006 y paralelamente a los servicios ya existentes RASANT y GeoFons, se inauguraron los servicios RTKAT, CODCAT y CATNET Web, servicios basados en la tecnología de estaciones virtuales. Incluyen servicios de tiempo real de código y fase con acceso IP, y repositorio de archivos de datos «a medida» de estaciones virtuales.
Estos nuevos servicios han tenido una buena acogida y se cuenta ya con 290 usuarios registrados. Desde el primer momento de su puesta en funcionamiento algunas empresas ya implementaron este sistema en sus métodos de trabajo, y gradualmente nuevas empresas se suman al número de usuarios habituales. Somos conscientes de que es un esfuerzo muy importante para los profesionales, tanto a nivel económico como a nivel organizativo y logístico, aplicar estas novedades tecnológicas y de metodología de trabajo. Por esta razón se valora aún más positivamente la buena respuesta que han tenido los nuevos servicios y agradecemos la confianza que en nosotros han depositado.
1. Estado actual de la red CATNET y servicios
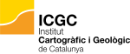
Iniciada en el año 1992, la red CATNET tiene actualmente 13 estaciones en servicio que recogen datos de la constelación GPS de forma continua con un período de 1 segundo. Estos datos son almacenados y distribuidos al público mediante diversos servicios de posicionamiento, tanto en tiempo real como para su post-proceso. Los esfuerzos de despliegue de infraestructura en emplazamientos y comunicaciones realizados en años anteriores, expuestos en artículos precedentes [16] , han permitido que la red CATNET soporte nuevos servicios en tiempo real. En este capítulo se expondrán y analizararán los servicios públicos disponibles para el posicionamiento de precisión (ver Figura 2).
En cuanto al desarrollo de la red, está previsto que durante el 2007 entren en funcionamiento tres nuevas estaciones según necesidades geográficas y de servicio. Por otro lado se está trabajando para proporcionar un sistema de comunicaciones efectivo para la transmisión de datos en tiempo real para la estación ESCO que en estos momentos no puede ser incluida en los servicios de tiempo real. Se está trabajando también para mejorar la calidad y efectividad de las comunicaciones en tiempo real de todas las estaciones, así como para convertir los sistemas de backup en sistemas también de tiempo real.

Figura 1: Estado actual de la red CATNET
Actualmente en la red CATNET los datos de todas las estaciones se combinan en una solución de red que permite determinar la componente espacial de los errores ionosféricos, troposféricos y geométricos que afectan a la señal GPS y de esta manera determinar un conjunto de observables virtuales en cualquier punto del territorio. Con esta técnica se provee a los usuarios de servicios de posicionamiento de precisión que les permite posicionarse sobre el territorio de Catalunya con precisión, trabajando de forma óptima con un único receptor.
Estos servicios se proporcionan desde enero de 2006 y se soportan sobre el protocolo NTRIP -Networked Transport of RTCM via Internet Protocol- que es el estandar RTCM SC104 de transporte de datos GNSS por internet. Es un protocolo de acceso público y abierto basado en el protocolo HTTP que permite centralizar el acceso a diferentes servicios de datos con un único punto de acceso para los usuarios. La nomenclatura utilizada por NTRIP define a la estación de referencia como «servidor», al centro de control «caster» o «centro de difusión» y al usuario que solicita las correcciones «client».
En general llamaremos CATNET-IP al conjunto de servicios que son accesibles por internet, independientemente del medio de acceso a la red.
Paralelamente se mantiene el servicio RASANT que continua transmitiendo las correcciones en el sistema RDS sobre la portadora de FM en Catalunya Musica. En el siguiente diagrama se muestran el esquema de servicios de la red CATNET.

Figura 2: Servicios de la red CATNET
Servicios de ficheros de datos para post proceso
- Geofons. Sistema de distribución de datos vía FTP. Actualmente se ofrecen los datos en archivos que contienen una hora de datos, con una cadencia de 1 y 15 segundos. También se dispone de ficheros de 24h a 30 segundos. Todos los ficheros siguen el estandard de intercambio RINEX. ftp://ftp.icc.es/geofons/
- CATNET web. Sistema de distribución de datos de una estación permanente GPS virtual vía web. A partir de la hora, intervalo de medida y las coordenadas donde se desea que se ubique la estación virtual, el sistema genera un fichero RINEX con las características solicitadas. http://catnet-ip.icc.es/
Servicios de tiempo real basados en el protocolo NTRIP
- DGPS. Sistema de difusión de correcciones de código de todas las estaciones permanentes de la red CATNET. Disponible en el caster del ICC en la dirección catnet-ip.icc.es, puerto 8080 bajo el protocolo NTRIP.
- CODCAT. Sistema interactivo de difusión de correcciones de código desde una estación virtual ubicada en la posición del usuario que permite una precisión decimétrica con los equipos adecuados. Disponible en el caster del ICC.
- RTKAT. Sistema interactivo de difusión de correcciones de fase desde una estación virtual ubicada en la posición inicial del usuario. Las correcciones se ofrecen en el estandard RTCM 2.3 y 3.0 y permiten una precisión centimétrica.
Otros servicios de tiempo real
- RASANT. Sistema de radiodifusión de correcciones diferenciales de código calculadas por el ICC en estaciones de referencia GPS. Las correcciones se ofrecen en el formato estandard RTCM. Se transmiten utilizando el sistema RDS (Radio Data System), que incorpora la señal de Catalunya Música en sus emisiones. La cobertura útil en condiciones normales se extiende al 90% del territorio cubriendo un 95% de la población.
Para mejorar la calidad del servicio y ofrecer una mejor información al usuario se ha puesto en marcha un servicio de monitorización de los servicios en tiempo real que se puede consultar desde la página web del servicio, catnetip. icc.es. Este servicio de monitorización consulta de forma periódica el estado de los servicios utilizando los mismos mecanismos que los usuarios y comprueba tanto la disponibilidad como el contenido del servicio. En el futuro se harán extensibles los mecanismos de notificación por e-mail y SMS de incidencias a los usuarios.

Figura 3: Ejemplo del sistema de monitorización
2. Experiencias con el servicio RTKAT
Para presentar públicamente el servicio RTKAT, el ICC realizó previamente unos estudios de precisión del sistema RTKNet de Trimble que provee el servicio. Estos estudios se mostraron en la presentación pública del servicio en febrero de 2006. Se basaban en la medición de puntos existentes de la red XU y su posterior comparación de las coordenadas obtenidas en tiempo real con las conocidas (ajustadas) de la red. Se utilizaron distintas zonas de test, algunas de ellas separadas más de 150km, de manera que en el cálculo de sus coordenadas intervenían estaciones de referencia distintas. Con una repetibilidad de 3 observaciones en diferentes épocas por punto se obtuvo como resultado precisiones inferiores a 2cm en planimetría e inferiores a 6cm en altimetría.
3.1 Trabajos realizados
A partir de esta información se validó la capacidad del servicio RTKAT para satisfacer algunos de los trabajos de determinación de coordenadas que realiza el ICC. Así pues se estableció una metodología interna de trabajo para mediciones con RTKAT y se empezó a utilizar como método habitual de trabajo para algunos proyectos. En concreto se ha utilizado para determinar la cota elipsoidal de puntos de redes de nivelación de alta precisión y así poder evaluar la ondulación del geoide de Catalunya; también se ha utilizado para la determinación de puntos culminantes de montañas en el proyecto «100 cims» en que se miden las cimas más emblemáticas de Catalunya. En ambos proyectos el rendimiento del sistema ha sido muy satisfactorio. También se ha empezado a evaluar la utilización de este sistema para la determinación de coordenadas de puntos de la XU.
- Proyecto: 100 cims
Nº puntos medidos: 25
Metodología de trabajo: se realizan tres observaciones separadas 20′ en caso de no haber cobertura telefónica se realiza una sesión de 20′ en estático para post procesar con estación virtual.
- Proyecto: determinación de la cota elipsoidal de puntos de redes de nivelación de alta precisión
Nº puntos medidos: 150
Metodología de trabajo: los puntos de la red de nivelación principales están distribuidos cada 3 km aproximadamente. Se realizan 3 observaciones por punto separadas en el tiempo de manera que al menos dos de ellas difieran en 6 horas. Por ejemplo un punto se medirá una vez por la mañana, otra por la tarde y una tercera observación en un segundo día.
Rendimiento: con este método y contando una jornada de 8.5 horas se consigue un rendimiento de unos 11 puntos por día.
En comparación con los métodos utilizados hasta la fecha podemos comprobar que el rendimiento en cuanto a número de puntos por día se incrementa por dos, mientras que el precio por punto se reduce por cuatro; además este rendimiento se obtiene con tan sólo un operador y no con cuatro como requería la medida de bases en post proceso.
En la Tabla 1 se comparan los rendimientos de tres métodos de trabajo distintos utilizados en la medición de la red de nivelación para obtener alturas elipsoidales.
El primer método era el utilizado antes de la implantación de los servicios CATNET-IP y consistía en obtener las coordenadas GPS de los puntos a partir de la medición de bases en sesiones de 4 receptores, calculando las coordenadas de los puntos de la red de nivelación a partir de vértices de la red geodésica. Posteriormente, y a partir de la implantación de los servicios basados en estaciones virtuales, se pasó a medir los puntos con sesiones de 20′ y calcular en post proceso con estaciones virtuales. Finalmente, y después de un período de comprobaciones y validaciones, se optó por utilizar el servicio RTKAT como herramienta válida para la determinación de alturas elipsoidales en este proyecto.
| Método | Tiempo | Estacionamientos | Operadores |
Precisión |
Observaciones |
Puntos |
Precio /punto |
| Estacionamiento estático con post-proceso de bases en red geodésica |
20′ |
Un estacionamiento por punto en sesiones de 4 receptores |
4 |
3 cm |
20 |
6 |
Precio inicial |
| Estacionamiento estático con post-proceso de estaciones virtuales |
20′ |
2 por punto |
1 |
3 cm |
9 |
5 |
60% pi |
| RTKAT |
5′ |
3 por punto |
1 |
5 cm |
32 |
11 |
25% pi |
Tabla 1: Comparativa de rendimiento RTKAT versus metodologías post proceso
Proyecto: comprobación con coordenadas de vértices ROI
Nº puntos medidos: 15
Metodología de trabajo: se realiza una observación en RTKAT, una observación de 20′ en estático para post procesar con estación virtual y una segunda observación en RTKAT separada al menos en 30′ de la primera.
La diferencia entre el promedio las coordenadas obtenidas por el servicio RTKAT y las calculadas en post proceso presentan diferencias despreciables (del orden de pocos milímetros).
- Proyecto: comprobación con coordenadas de vértices REGENTE
Nº puntos medidos: 10
Metodología: de trabajo: se ha seguido la misma metodología que con los puntos de la ROI, obteniéndose resultados similares.
- XU, Red Utilitaria de Catalunya
El ICC está analizando la posibilidad de determinar coordenadas de puntos de la XU con el sistema RTKAT. Se está validando la metodología que debería usarse para conseguir una precisión igual a la obtenida con la metodología usada hasta ahora, basada en la medición de bases de triángulos en sesiones de al menos 4 receptores simultáneos. El método seria la determinación de puntos a partir de 3 pasadas por cada punto.
3.2 Tests de interpolación y extrapolación
En general se habla de la dependencia de los errores con respecto a la distancia entre la estación de referencia y el receptor móvil. En general el área de trabajo y distancia del usuario alrededor de la estación viene limitada por la precisión requerida. Así para precisiones centimétricas con solución de fase en tiempo real la distancia se ve restringida a unos 20 km, siempre que la actividad ionosférica sea suave. Si se aplica una solución de red a los datos calculados por la red de estaciones, entonces se ampliará el ámbito de trabajo hasta 30 a 50 km, siempre dependiendo del estado de la ionosfera, la geometría de los satélites y los equipos utilizados por el usuario. Esto permite configurar redes con algunas distancias entre estaciones de hasta 100 km y otras distancias menores, que pueden ofrecer un buen servicio de posicionamiento en tiempo real como es el caso de RTKAT. Dado el caso desfavorable de un triángulo con unos lados de unos 80 km, cualquier punto dento del triángulo estará siempre a
menos de 40-50km de tres estaciones, con lo cual todos los puntos dentro de la red siempre tendrán la precisión ofrecida por el sistema.
¿Pero qué pasa cuando intentamos medir un punto fuera de la red? Todos los parámetros utilizados en el cálculo de las correcciones nos dan una solución válida para el entorno dentro de la red, pero no necesariamente se deba obtener buenas precisiones para puntos que se encuentran en el exterior. Debido a que el territorio de Catalunya tiene aún pequeñas zonas no cubiertas por el servicio RTKAT (aunque sí por el resto de los servicios de tiempo real y de datos para post-proceso), interesa especialmente evaluar el comportamiento de las correcciones fuera del área de servicio RTKAT. Para ello se ha realizado otro test para evaluar las precisiones que pueda dar el servicio para la determinación de puntos que estén fuera de los triángulos que conforman el sistema.
En la red CATNET encontramos bases entre estaciones de hasta 130 km. A pesar de ello las precisiones obtenidas en este ámbito más desfavorable son aceptables.
Para evaluar la viabilidad de utilizar el servicio RTKAT fuera del área teórica de uso se ha utilizado el método que se describe a continuación.
En primer lugar se ha escogido uno de los triángulos externos de la red de triángulos que conforman la red de estaciones permanentes GPS CATNET. A continuación se ha trazado la bisectriz del triángulo que una vez prolongada sobresale fuera de la red, y sobre esta bisectriz se han escogido una serie de vértices geodésicos que se ajustasen al máximo al trazado de la bisectriz. Esta bisectriz se ha prolongado hasta 30 km fuera de la red, escogiendo sobre ella vértices cada 5 km. La elección de la zona de test no era trivial, ya que un tercio de la red limita con el mar, el otro tercio limita con los Pirineos y la red del estado francés, y el tercio restante limita con el oeste de Catalunya y con Aragón en una zona con baja densidad de vértices. Finalmente se optó por el triángulo delimitado por las estaciones AVEL, SORI, BELL, ya que a lo largo de este último año se había establecido XU en este área y ofrecía una zona de test adecuada.
Se evalúan las precisiones de varios puntos situados sobre una de las bisectrices del triángulo, separados unos 5 km entre ellos, y se comparan las precisiones del punto más favorable, con las de los otros puntos a medida que nos alejamos del centro hacia el exterior del triángulo sobre la bisectriz.
Bajo los criterios expuestos se han medido 11 puntos. En cada punto se han realizado tres series de mediciones, con dos observaciones en cada serie, con una separación entre series de medidas de al menos 6 horas, y al menos 2 de las series en dos días diferentes.
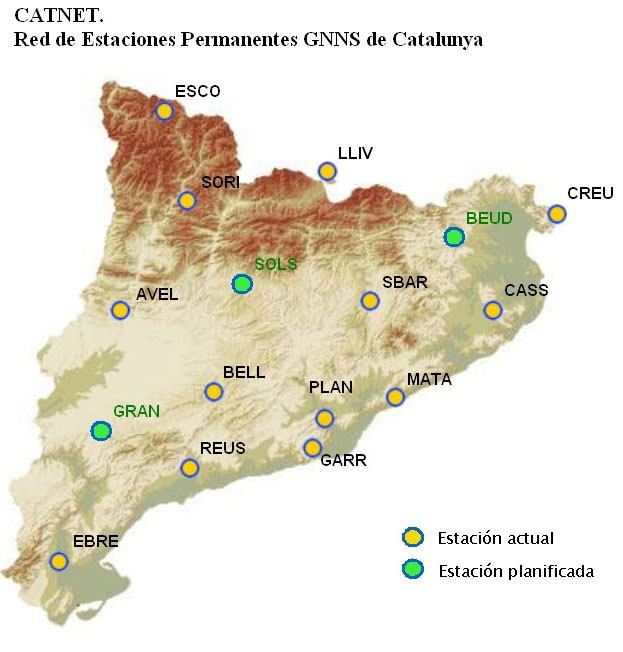
Una vez analizados los resultados, y teniendo en cuenta que la precisión nominal que ofrece el servicio RTKAT es de 4 cm en planimetría y de 6 cm en altimetría, no vemos ningún comportamiento significativo en los errores al comparar las coordenadas observadas con RTKAT con las ya conocidas.
En la Figura 4 y la Figura 5 se puede observar la desviación estandar y el RMS de cada punto ordenado según su distáncia al centro del triángulo.

Figura 4: Desviación estandar en la determinación de los puntos medidos
Figura 5: RMS de las diferencias de los puntos medidos respecto a las coordenadas XU conocidas
Como conclusión a este test se puede decir que no se aprecia correlación entre la precisión de las posiciones y de las coordenadas obtenidas con su posición respecto al área cubierto por el servicio RTKAT, y que las posiciones obtenidas fuera del área de servicio entran en el rango de precisiones del servicio y tampoco presentan ninguna correlación respecto a su distanciamiento del área de servicio. Por tanto se puede dar por válido el uso del servicio RTKAT en un radio alrededor de 30 km alrededor de la red de servicio RTKAT.
|
MÍNIMO |
MEDIO |
MÀXIMO |
RANGO |
R.M.S |
EM.STD |
|
|
UTMX |
-0.0566 |
-0.0038 |
0.0251 |
0.0817 |
0.0171 |
0.0168 |
|
UTMY |
-0.0223 |
0.0110 |
0.0814 |
0.1038 |
0.0239 |
0.0214 |
|
h |
-0.0880 |
-0.0254 |
0.0426 |
0.1306 |
0.0424 |
0.0343 |
Tabla 2: Tabla resumen sobre las 54 observaciones realizadas
En general se puede decir que la utilización del servicio RTKAT es muy satisfactoria, aunque a lo largo de los diferentes tests y trabajos puntualmente se han encontrado problemas en la inicialización del sistema, que en determinados dias se realiza sin problemas mientras que en otros es imposible. En estos casos el post proceso con estaciones virtuales es una buena solución. Otro problema que se presenta es la insuficiencia de satélites observados, ya que para resolver ambigüedades es necesario un mínimo de 5 satélites, en determinados entornos y horarios se requiere un estudio de la constelación y la planificación del trabajo. Otros problemas ocasionales son la desconfiguración de los equipos usuario.
3. Conclusiones
Según el test de extrapolación realizado vemos que es posible trabajar fuera del área de servicio con unos resultados dentro de la precisión nominal del servicio, aunque no se puede generalizar para todo el ámbito territorial. Será necesario realizar más tests en otras zonas para poder generalizar las conclusiones de los resultados obtenidos, ya que en algunas redes similares sí se ha observado una degradación de la precisión según la distancia a la zona de cobertura del servicio.
A la luz de los resultados expuestos, y el permanente crecimiento por parte de la comunidad de usuarios en el uso de los servicios proporcionados por el ICC parede indicar que el ICC está trabajando en la dirección correcta en cuanto al despliegue de servicios para el posicionamiento activo mediante sistemas GNSS. Actualmente el servicio RTKAT está disponible en todo el territorio de Catalunya, si bien hace falta densificar algunas zonas para equiparar la integridad del servicio en todo el territorio. En este sentido se esta trabajando en el despliegue de nuevas estaciones y la puesta en marcha de sistemas de calidad que permitan al usuario conocer en tiempo real el funcionamiento actual y pasado del los distintos servicios. Se está evaluando la instalación de diversos receptores fijos y móviles para comprobar la calidad del posicionamiento en diversos puntos de la red. Los servicios de la red CATNET seguirán siendo evaluados continuamente mediante los trabajos propios del ICC, que actúan de realimentación para ayudar a identificar puntos débiles y fuertes.
El desarrollo de los servicios y los resultados con CATNET-IP están siendo muy satisfactorios tanto por el rendimiento como por la calidad de los trabajos realizados. Esto se ha constatado por el ICC y por los usuarios del servicio que nos hacen llegar sus comentarios, aunque se observa un factor crítico como es la correcta utilización de los sistemas de referencia.
Finalmente agradecemos a todos los usuarios, actuales y futuros, la confianza que nos muestran en el uso de nuestros servicios, y animamos a todos a que nos hagan llegar sus dudas y comentarios con el fin de mejorar nuestra tarea de servicio.
REFERENCIAS
- [1]. Colomina,I., Térmens, A., Ortiz,M.A., Talaya,J., 1995. SPGIC: Integrated Geodetic Positioning System of Catalonia. International Union of Geodesy and Geophisics (IUGG) XXI General Assembly, 2.7.95 — 14.7.95 Boulder, (Colorado – EEUU).
- [2]. Colomina,I., Ortiz,M.A., Térmens,A., 1995. Redes geodésicas virtuales. Maratón GPS. Madrid,3-4 Abril 1995.
- [3] EUREF Technical Working Group, 2000. EPN Special Project, Time Series for Geokinematics. EUREF Symposium, Tromso, June, 2000. http://www.epncb.oma.be/projects/sp_timeseries.html
- [4] Haase,J., Calais, E.,Talaya,J., Rius,A., Vespe,F., Santangelo,R., Huang,X.-Y., Davila,J., Ge,M., Flores,A., Vedel,H., Mogensen,K., Yang,X.,1999. The MAGIC project: GPS meteorology in the Mediterranean and requirements for data consistency and quality. European Geophysical Society XXIV General Assembly, The Hague, The Netherlands, 19-23 April 1999.
- [5]. Roca, A., Goula,X., Olmedillas J.C., Talaya,J., 1998. Redes de Observación Geofísica con plataformas VSAT. Proyecto de red del Institut Cartogràfic de Catalunya. Jornadas científias, 100 años de observaciones sismológicas en San Fernando. Julio 1998, San Fernando.
- [6]. Bosch,E., 2000. Nuevas tecnologías para el establecimiento de servicios de correcciones diferenciales GPS. IV Semana Geomática de Barcelona, 3-6 Abril, 2000.
- [7]. RTCM Recommended Standards For Differential NAVSTAR GPS Reference Station and Integrity Monitors (RSIM). Version 1.0. Developed by RTCM Special Committee No. 104.
- [8]. Talaya,J., Mesa,J., Segarra,J., Colomina,I., 1997. El Sistema DGPS RASANT en Cataluña. III Semana Geomática de Barcelona, 8-11 Abril 1997.
- [9] Weber, G.EUREF and Real Time Products. http://igs.ifag.de/euref_realtime.htm
- [10] Vollath,U., Deking,A., Landau,H., Pagels,C., 2001. Long-Range RTK Positioning Using Virtual Reference Stations. International Symposium on Kinematics Systems in Geodesy, Geomatics and Navication. The Banff Centre. Banff, Canada, June 5 – 8, 2001.
- [11] Goula,X., Jara,J.A., Susagna,T., Roca,A., 2001. A New Broad-Band Seismic Network with Satellite Transmission in Catalonia (Spain). http://orfeus.knmi.nl/newsletter/vol3no1/catalonianet.html
- [12]. Ortiz,M.A., Talaya,J., Bosch,E., Parareda,C., 1998. GPS diferencial en tiempo real en Cataluña. II Maratón GPS. 16 – 17 Noviembre, Madrid.
- [13]. Parareda,C., Bosch,E., Térmens,A., Ortiz,M.A., Talaya,J., 2003. Catnet: servicios de posicionamiento de alta precisión y su integración en las nuevas tecnologias de la información.. VI Semana Geomática de Barcelona, Febrero 2003.
- [14]. RTCM Recommended Standards For Differential NAVSTAR GPS Service. Version 2.2. Developed by RTCM Special Committee No. 104.
- [15]. Talaya,J., Bosch,E., 1999. CATNET, a permanent GPS network with real-time capabilities. Proc. ION GPS-99, 12th Int. Tech. Meeting of The Satellite Division of The U.S. Institute of Navigation, 14-17 September, Nashville, (Tennessee – EEUU).
- [16]. European Telecommunication Standard Institute, 1997. Radio broadcasting systems; Digital Audio Broadcastig (DAB) to mobile, portable and fixed receivers. Final draft ETS 300 401 January 1997 Second Ed.
- [17] http://www.nanometrics.ca/products/libra/libra_contents.htm.