Tras varios años de pruebas, diseño de software y captura específica de datos, a finales del último semestre del 2010, el Institut Cartogràfic de Catalunya decide embarcarse en un ambicioso proyecto: la producción de ortofoto verdadera en distintos municipios del territorio catalán. En su primera fase, este proyecto contempló la realización de diferentes zonas urbanas, concretamente 16 municipios, suponiendo un total de aproximadamente 3463 Ha. repartidas en 112 hojas del corte 1:2000. Para este año está previsto añadir unos 90 municipios más y el producto ortoimagen, con un píxel de 10cm, será distribuido como complemento al mapa topográfico 1:1000. Para su realización se efectuaron varios vuelos, con un GSD (Ground Sampling Distance) de 7.5cm, sobre las distintas poblaciones. En este proyecto han confluido dos aspectos fundamentales: las dificultades que conlleva la elaboración de ortofoto a escalas grandes y la complejidad de la generación de ortofoto verdadera, íntimamente ligada a las características del modelo de superficie.
Todo proyecto de carácter productivo se apoya en un diseño claro de flujo de trabajo y en una metodología suficientemente testada y desarrollada que aseguren resultados ágiles y, sobre todo, rentables. Por ello, el ICC se ha basado en la experiencia adquirida, durante años, en el campo de la generación de ortofoto convencional.
En este artículo se abordarán las diferentes acciones llevadas a cabo para poder realizar este proyecto, enfocadas siempre des del punto de vista productivo. Nos centraremos en las características del modelo de superficie, los resultados obtenidos y en el grado de intervención manual necesario para la obtención del producto final. Todo ello, no obstante, sin olvidar el desarrollo de algoritmos y software automático necesario para adaptar, con buenas probabilidades de éxito, la cadena de producción de ortofoto convencional a una cadena de producción, eficiente y robusta, de ortofoto verdadera.
2. Datos empleados
2.1 Vuelo fotogramétrico
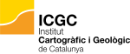
En el primer periodo del proyecto se ha trabajado con un total de 1130 fotogramas distribuidos por las diferentes poblaciones (Figura 1).

Figura 1: Ámbito del proyecto y ejemplo de dos zonas de trabajo.
La configuración de los vuelos necesarios para cubrir la zona del proyecto se muestra en la tabla 1.
| Cámara: | DMC |
| G.S.D.: | 0.075 m |
| Distancia focal: | 120 mm |
| Recubrimiento longitudinal: | 60 % |
| Recubrimiento transversal: | 60 % |
| Altura de vuelo sobre el terreno: | 750 m |
| Sistema inercial: | Applanix POS VA v.5 |
Tabla 1: Características del vuelo
2.2 Modelo Digital de Superfície
Generar un Modelo Digital de Superficie (MDS) en un entramado urbano es, probablemente, el aspecto más complejo y costoso del proceso de generación de ortofoto verdadera. En nuestro caso, dada la extensión del proyecto, se ha considerado oportuno adaptar el MDS utilizado para generar el producto Mapa Urbà de Catalunya (MUC). Este modelo, cuyo origen hay que buscarlo en el Mapa Topogràfic de Catalunya 1:1000, se estructura como una red irregular de triángulos (TIN) y se utiliza para rectificar las imágenes a pesar de que las especificaciones de este MDS no son las ideales para la generación de ortofoto verdadera. Recoge información de edificaciones y construcciones superiores a 4 m2 y se añaden subestructuras superiores a 50 cm de altura que se encuentren encima de otras construcciones. Este MDS no incorpora las estructuras externas de las edificaciones, como balcones y voladizos, y tampoco las alturas de los tejados a dos o más vertientes. El resultado es una modelación de los edificios como cajas simples [6].
Nuestro reto consiste en adaptar en lo posible el software y el flujo productivo a las características de dicho modelo, aun siendo conscientes de la problemática que puede generar un MDS impreciso sobre un proceso automático.
3. Metodología
El proceso de generación y producción de ortofoto verdadera que se está llevando a cabo en el Institut Cartogràfic de Catalunya se apoya en el esquema clásico de producción de la ortoimagen digital. El flujo productivo, avalado por una amplia experiencia en dicho terreno, se puede desglosar en tres ámbitos de acción principal posteriores a la ortorrectitifación de las imágenes:
- Igualación radiométrica.
Con el objetivo de obtener un producto final continuo, las tareas más relevantes se centran en el balance radiométrico del bloque, eliminando efectos de origen físico (hotspot, viñeta), y la aplicación, sobre el mosaico final, de técnicas locales de realce [3]. - Cálculo de líneas de costura.
Asimismo, con ánimo de obtener un producto final continuo a nivel geométrico, hay que calcular las costuras necesarias para realizar el mosaico y solventar las zonas de ocultaciones, así como las zonas de estiradas. Para ello, es necesario disponer de máscaras que recojan, para cada uno de los fotogramas del bloque, los píxeles afectados por alguno de estos artefactos [4]. - Detección y edición de artefactos.
Finalmente, a pesar del desarrollo del software necesario y de contar con un elevado nivel de automatización en cada una de las etapas de la cadena, el proceso no está exento de actuación manual. En esta fase se realiza la detección de artefactos (ya sean residuales o generados por la propia metodología) y se contempla la elaboración de herramientas específicas para subsanarlos.
Dicho flujo clásico se ha mostrado insuficiente ante las características del nuevo proyecto, por lo que ha sido necesario implementar herramientas complementarias en los tres ámbitos descritos: Los elementos no recogidos en el Modelo de Superficie generan valores radiométricos muy diferentes sobre las mismas coordenadas, poniendo de manifiesto la necesidad de aplicar filtros sobre los puntos de correspondencia que deben intervenir en la compensación radiométrica del bloque y de desarrollar técnicas de balance local sobre el mosaico final. - Por otra parte, el número de ocultaciones que habrá que tratar y solventar, crece ostensiblemente cuanto mayor es el nivel de detalle del MDS. En consecuencia, se han implementado mecanismos de control de zonas ocluidas, optimizaciones de los algoritmos de búsqueda de costuras y algoritmos de segmentación de imágenes que permitan seleccionar, según criterios previamente fijados, qué combinación de fotogramas será la más apropiada para constituir la ortofoto verdadera final.
- Sin embargo, a pesar de la introducción de estas herramientas de refuerzo, permanecen en el producto final artefactos residuales, cuya solución se podrá abordar manualmente siempre que su presencia en el mosaico final sea poco relevante y, sobre todo, poco cuantiosa. Fuera de este contexto se encuentra el efecto «dentado» que producen las zonas de discontinuidad del MDS sobre los fotogramas ortorrectificados. En este proyecto, dado que el modelo recoge edificaciones y estructuras viales, este problema ha adquirido dimensiones excepcionales que han evidenciado la necesidad de contar con un proceso automático que elimine sus consecuencias.
3.1 Ortorrectificación estricta, detección de ocultaciones e interpolación dispersa
El algoritmo estándar de ortorrectificación se puede describir de una forma muy simple (Figura 2): cada punto en el espacio ortoimagen corresponde a un punto en la imagen original de acuerdo con un modelo geométrico apropiado al sensor específico que adquiere la imagen. En el caso concreto de la fotografía aérea, dicho modelo viene descrito por las ecuaciones de colinearidad.

Figura 2: Geometría básica de la ortorrectificación a partir de la adquisición de un fotograma.
En una ortofoto verdadera, los objetos como los edificios y los puentes deben aparecer en su auténtica posición planimétrica y vertical. Resulta evidente que una parte importante del proceso de generación de ortofoto verdadera consista en un análisis de visibilidad. En nuestro caso, dicho análisis está basado en la técnica buffer-Z [2]. Para cada punto de la superficie (espacio ortoimagen) se calcula la distancia entre este punto y su posición de observación en el plano p, previamente estimada con los parámetros de orientación interna y externa del sistema. El hecho de que una zona se presente ocluida, significa que algunos puntos de la superficie tienen las mismas coordenadas en el espacio imagen (puntos b y b’ de la Figura 2). Bajo estas circunstancias, elegiremos el píxel correspondiente a la distancia más corta y etiquetaremos el otro como ocultación. Para cada fotograma rectificado se genera su correspondiente mapa o máscara de ocultaciones.
Cuando utilizamos un algoritmo estándar de rectificación, el valor de cada píxel de la ortoimagen se calcula desde su proyección en la imagen original aplicando en su caso alguna técnica de interpolación. Sin embargo, la rectificación de imágenes para la generación de ortofoto verdadera plantea distintas casuísticas alrededor de las zonas discontinuas del MDS que deberán ser tratadas específicamente. Podemos observar como la posición c (Figura 2) corresponde a una singularidad situada entre dos zonas visibles que están en planos diferentes. Estos dos planos están conectados por otro, la fachada del edificio, visible en la imagen original y que no debe aparecer en la ortoimagen (Figura 3). En este caso, el algoritmo estándar de rectificación, al interpolar «erróneamente» píxeles de tejado y fachada (en lugar de píxeles de tejado y suelo) generaría una radiometría incoherente sobre los píxeles que constituyen la arista del edificio. La solución a este problema pasa por una reconstrucción de los DN (digital numbers) de la ortoimagen afectados. En nuestro caso, se ha optado por una detección (en tiempo de rectificación) de las zonas de discontinuidad según su distancia al centro de proyección con el objetivo de, en una fase posterior, interpolar los valores de sus píxeles en el espacio de ortoimagen (donde tejado y suelo son contiguos). A este proceso lo hemos llamado «interpolación dispersa«.

Figura 3: Zonas de singularidad en el fotograma original (izquierda) y en la ortoimagen (derecha).
Notemos finalmente, que el punto a (Figura 2) también corresponde a una singularidad y por lo tanto, bajo estas premisas, deberíamos aplicar mecanismos de restauración radiométrica. No obstante, al estar situado al límite entre una región visible en el fotograma y una zona de ocultación en el espació ortoimagen, no es necesario tratarlo ya que esta zona será eliminada al procesar la ocultación.
Se ha optado por tratar las ocultaciones en un proceso posterior al mosaico, restringiéndonos a la parte útil del fotograma (que es la parte que contribuye al mosaico preliminar) con el objetivo de reducir significativamente el número de líneas de costura que habrá que calcular y su complejidad.
Una vez finalizado el proceso de rectificación y de detección de zonas ocultas, se inicia el proceso automático de búsqueda de líneas de costura que delimitan las zonas de cada fotograma que deberán contribuir al mosaico final [4]. Este método se basa en la definición de una imagen de coste entre las zonas de solape de un par de imágenes adyacentes, así como de un conjunto de píxeles de salida y de llegada que marcan el origen y el destino de la costura. De este modo, se calcula un camino de coste mínimo que conecta los conjuntos anteriormente descritos. Para que el mosaico resultante no contenga artefactos indeseados, el punto clave de este algoritmo residirá en una definición apropiada de la función de coste y de los conjuntos de salida y de llegada.
3.2 Tratamiento de ocultaciones
Disponemos, pues, del mosaico preliminar, de los mapas de ocultaciones y de las costuras que definen las partes útiles del fotograma que contribuirán a la generación del mosaico. El siguiente paso del proceso consiste en acotar los mapas de ocultaciones de cada fotograma por su contribución al mosaico final, con el fin de obtener una imagen de sombras geométricas residuales (Figura 4).

Figura 4: Mosaico preliminar y mapa de ocultaciones residuales.
Para cada una de las ocultaciones se realiza un análisis previo y se decide cuál es el fotograma que utilizaremos para eliminar la zona ocluida. Pueden definirse varios criterios, como la verticalidad de la vista, el porcentaje de ocultación cubierta, etc. El resultado de este proceso es una lista de segmentos de imagen adquiridos desde distintos puntos de vista que, añadidos al fotograma que estamos analizando, constituirán una ortofoto estricta completa, libre de zonas ocultas.
A continuación, el objetivo es generar un conjunto de costuras que encierren los segmentos que añadiremos al mosaico preliminar, cuyas zonas de sombra geométrica queremos tratar. En primer lugar, se genera una imagen de coste a partir de la evaluación de las diferencias radiométricas entre el fotograma rectificado que usaremos para cubrir la zona ocluida y el mosaico preliminar. Posteriormente, se genera un gráfico simple para este fotograma, a partir de los mapas de ocultaciones y la creación de segmentos artificiales que conectaran, entre sí, las zonas ocluidas que queremos resolver y las ocultaciones del fotograma auxiliar. A todos estos píxeles del gráfico se les asigna un coste máximo (Figura 5).

Figura 5: Ocultaciones a resolver (izquierda), fotograma que las cubre (centro) e imagen de diferencias radiométricas y grafo de ocultaciones y segmentos (derecha).
Finalmente, se aplica el algoritmo general de búsqueda de costuras en cada segmento obteniendo así una costura cerrada de coste mínimo que, además, garantiza que no se hayan añadido nuevas ocultaciones al mosaico final.

Figura 6: Líneas de mosaico obtenidas con software (izquierda) y mosaico final (derecha).
Desde el punto de vista radiométrico, la experiencia ha demostrado que la igualación global del bloque no es suficiente para garantizar la continuidad, por lo cual, durante el proceso, se realiza una igualación local y automática de los histogramas entre el segmento que cubrirá la ocultación y la imagen de destino (Figura 6).
4. Detección y edición de artefactos residuales
4.1 Detección de artefactos
El mayor volumen de artefactos se debe a las discrepancias entre el modelo digital y la forma real del terreno. Uno de los más frecuentes es consecuencia de la incompleta digitalización de los edificios, sin tener en cuenta estructuras menores como balcones, voladizos o barandillas de terrazas. Estas pequeñas estructuras pueden ocultar áreas que no quedan recogidas en las zonas de ocultación durante el proceso. Este es el motivo por el cual una región, que en las ortofotos debería ser una oclusión, muestra elementos proyectados en suelo. (Figura 7)

Figura 7: Ejemplos de elementos proyectados en el suelo.
Sin embargo, también hay que destacar que estas pequeñas zonas no detectadas como ocluidas generan píxeles adyacentes a las ocultaciones de valor muy elevado en la imagen de diferencias radiométricas. De este modo se consigue, en la mayor parte de los casos, que la costura opte por integrarlas a la zona de ocultación y, por tanto, se resuelvan satisfactoriamente.
Por otra parte, el hecho de que en el modelo no se recoja toda la información relativa al edificio, también tendrá una importante repercusión en el aspecto que éste adquirirá en la imagen final. Efectivamente, si las zonas ocultas generadas por una construcción han sido resueltas con éxito, éste heredará, de forma inevitable, la simplificación con la que se ha recogido en el MDS (Figura 8)

Figura 8: Fotograma original (izquierda) y producto final simplificado (derecha).
Existen otros elementos a tener en cuenta. Por ejemplo, si la altura de un edificio no se ciñe completamente a la real, la rectificación del fotograma y el cálculo de las sombras geométricas no serán totalmente correctos. Esta problemática se pone de manifiesto, de forma muy clara, cuando observamos tejados a dos (o más) aguas. Las especificaciones topográficas aproximan esta clase de tejados por un plano horizontal a su altura máxima, de modo que, una vez rectificados, quedan ubicados en posiciones distintas en función del fotograma. Esta imprecisión del MDS se traduce en una significativa falta de congruencia en el resultado final (Figura 9).

Figura 9: Incongruencias en tejados a dos (o más) aguas.
Finalmente, detectamos una última tipología de artefactos que afectan a toda clase de estructuras y subestructuras que pueda contener una edificación, ya sean interiores (patios) o sobresalientes (cajas de ascensor, claraboyas, etc.). Estos elementos combinan dos problemáticas distintas: por una parte, si están recogidos en el modelo, generan zonas de ocultación generalmente muy próximas a elementos que no están presentes en el MDS. En consecuencia, al incorporar información de otros fotogramas, los elementos cuya información no está registrada en el modelo generan importantes discrepancias en la ortofoto final (Figura 10).

Por otro lado, también el hecho de que haya que solventar zonas de ocultación sobre tejados da lugar a problemas de carácter textural cuando la superficie de los mismos es de tejas, estructuras corrugadas o algún otro tipo de cubierta con textura periódica.
4.2 Edición digital de artefactos
Los artefactos residuales descritos anteriormente no tienen otra solución que su edición y retoque manual. Dada la extensión del proyecto, su aparición ha sido notable y ha requerido el desarrollo de herramientas específicas que sean de ayuda al operador experto a la hora de ubicar las distintas problemáticas. La propia detección de zonas ocultas combinada con el cálculo de costuras proporciona información acerca de aquellas ocultaciones que no se han resuelto de forma satisfactoria. Esta herramienta es de gran utilidad cuando se trata de detectar ocultaciones que no se han podido solventar en su totalidad. Lamentablemente, esta situación se ha dado en más ocasiones de las previstas. Si bien es cierto que el proyecto se ha desarrollado sobre núcleos de población poco extensos, también lo es que sus tramas urbanas han resultado tener una relación entre altura de edificios y anchura de calles que, en algunos casos, ha dado lugar a zonas de ocultación irresolubles.
5. Conclusiones
Se ha diseñado un flujo productivo de ortofoto verdadera automatizado.
Se ha implementado un método automático de tratamiento de ocultaciones para la generación de ortofoto estricta a escalas grandes combinando la igualación radiométrica y la búsqueda de líneas de costura. Los resultados muestran que es eficiente en general sobre un DSM proveniente del topográfico 1:1000.
La igualación global del bloque ha resultado insuficiente y se han desarrollado técnicas de igualación local. Los problemas radiométricos en el resultado final han sido inexistentes.
El recubrimiento del vuelo fotogramétrico y las características del MDS condiciona en gran medida el resultado. El solape ha resultado insuficiente en algunos casos y las discrepancias entre el modelo y el terreno real producen artefactos que requieren intervención manual por parte de un operador experto.
El volumen de datos y el coste computacional ponen de manifiesto la necesidad de una gestión eficiente de procesadores y archivos.
6. Trabajos futuros
El proyecto sigue contando con un espacio de desarrollo, actualmente centrado en aumentar el grado de automatización a lo largo de todo el proceso. Una simplificación inteligente del modelo a nivel de estructuras y subestructuras contenidas en los edificios disminuiría en gran medida los artefactos. Por otra parte, la incorporación de los perímetros de las edificaciones en el software de búsqueda de líneas de costura como parte del grafo de píxeles de coste máximo, evitaría incongruencias y problemas de carácter textural.
Referencias