EUREF, subcomisión de la IAG (International Association of Geodesy) para el marco de referencia europeo, siguiendo su primera resolución adoptada en Firenze en 1990, recomienda que los países europeos adopten el sistema ETRS89. La adopción de este sistema ha sido recomendada, también, por la UE (Unión Europea), EuroGeographics y Eurocontrol, entre otras entidades a nivel nacional y europeo.
La UE inició y apoya la directiva INSPIRE (Infrastructure for Spatial Information in the European Comunity) para qué la información geográfica sea disponible, armonizada y de calidad. La asociación EuroGeographics, en representación de las agencias nacionales europeas de cartografía y catastro, trabaja en el desarrollo de productos y servicios a nivel europeo, promoviendo la colaboración y cooperación de sus miembros. La organización Eurocontrol desarrolla y coordina planes para la implementación a corto, medio y largo plazo de estrategias de gestión del tráfico aéreo a nivel europeo. De todo esto se desprende que ETRS89 debe permitir la georeferenciación común de elementos dentro de la comunidad europea y, además, debe facilitar la mayor interoperabilidad de la información geográfica, así como de los sistemas de posicionamiento global.
En los ámbitos astronómico, geofísico, geodésico y cartográfico de la sociedad de la información actual, los marcos de referencia globales se han convertido en una necesidad constante. Tanto es así, que ya en 1987 la IAU (International Astronomical Union) y la IUGG (International Union of Geodesy and Geophysics) crearon el IERS (International Earth Rotation and Reference Systems Service) con el objetivo de que se convirtiera en la institución encargada de definir, realizar y promocionar estos marcos de referencia globales, llamados ITRF (International Terrestial Reference Frames) y apoyados sobre ITRS (International Terrestrial Reference Systems) del tipo ECEF (Earth Centered Earth Fixed). Estos sistemas de referencia giran solidariamente con la Tierra en su movimiento diurno y, con el tiempo, sufren ligeras modificaciones debido a las propias deformaciones del planeta y a los procesos de actualización, que incorporan nuevas técnicas de observación y metodologías de cálculo.
El Real Decreto 1071/2007 oficializa el sistema de referencia ETRS89 tomando como marco la red de vértices REGENTE y sus densificaciones, a la vez que define un nuevo corte geográfico en base al MTN50 (Mapa Topográfico Nacional 1:50.000), a emplear en las series cartográficas a nivel nacional. Todo esto implica que no solamente es necesario contemplar el impacto del cambio al nuevo datum, sino también la asunción del nuevo corte y las implicaciones que esto puede tener en las series producidas hasta el momento.
1. El origen ED50 y el destino ETRS89
1.1 ED50
El sistema de referencia geodésico ED50 (European Datum 1950) fue motivado en el transcurso de la Segunda Guerra Mundial, durante la cual se hizo patente la necesidad de conectar internacionalmente las diferentes redes geodésicas europeas. Algunas de las batallas más importantes de la Segunda Guerra Mundial, que tuvieron lugar en Europa, toparon con el problema que las cartografías de los diferentes países tenían diferentes sistemas de referencia, lo que complicaba las tareas de los ejércitos. Este hecho condujo al departamento de defensa de los Estados Unidos a establecer ED50 como el datum único para realizar la cartografía de todo el oeste de Europa.
La materialización del sistema de referencia ED50 calculada por el AMS (Army Map Service) supuso la unificación de los sistemas de referencia geodésicos para gran parte de Europa Occidental. Las coordenadas en ED50 lograron, en aquellos momentos, una exactitud continental que oscilaba entre unos pocos metros en el centro de Europa y más de diez metros en el extremo sur.
ED50 está basado en el elipsoide Internacional de 1924 (también conocido como elipsoide de Hayford 1909). Este elipsoide fue ampliamente utilizado en todo el mundo hasta los años 1980, cuando se determinaron los elipsoides GRS80 (Geodetic Reference System 1980) y WGS84 (World Geodetic System 1984). GRS80 es el elipsoide asociado al sistema de referencia ETRS89 mientras que WGS84 hereda, directamente, el mismo nombre del sistema de referencia en el que se utiliza.
La materialización del marco ED50 en España proviene del ajuste de la RPO (Red de Primer Orden) realizado por el AMS. Esta RPO fue densificada por el IGN con las observaciones de la ROI (Datum ED50), efectuadas con teodolito. La precisión obtenida con esta densificación se hallaba entre los 10 cm y los 30 cm, suficiente para los trabajos de cobertura 1:25.000, objetivo del IGN. No obstante, esta precisión no era suficiente para los trabajos de grandes escalas que tenía que abordar el ICC. Esto motivó que el ICC reobservara con GPS los vértices de la ROI en Catalunya. Del ajuste de esta reobservación resultó un marco ED50-ICC en el que las coordenadas de la ROI tenían una precisión de 3 cm.

Figura 1: Compatibilidad estadística de ED50 (IGN) con ED50 (ICC)
Este marco ED50-ICC ha sido utilizado por el ICC como marco geodésico de sus productos oficiales en ED50, ya que dispone de la precisión necesaria para ello. Para preservar la oficialidad de la producción cartográfica producida en el marco ED50-ICC se garantizó que todas las coordenadas fuesen equivalentes desde el punto de vista estadístico, pero dotadas de mayor coherencia (ver Figura 1).
1.2 ETRS89
ETRS89 es un sistema geodésico de referencia tridimensional, basado en el elipsoide GRS80. Coincide con el ITRS en el marco ITRF89 época 1989.0, materializando el marco ETRF89 época 1989.0. Es un sistema de referencia ligado a la parte estable de la placa europea y se mueve solidariamente a la placa tectónica Eurasiática. Periódicamente se actualizan los parámetros que permiten transformar datos georeferenciados entre los sistemas ITRS y ETRS89 sin pérdidas de precisión.
En 1998, EUREF adoptó las coordenadas de la red IBERIA en ETRS89, calculadas en la campaña IBERIA95, y las clasificó como red de clase B. En base a esta red IBERIA, el IGN densificó la red REGENTE, que es el marco oficial ETRS89 en España. A partir de las coordenadas REGENTE, y incorporando las observaciones GPS del ICC (las mismas que se han venido utilizando para el cálculo de la red en ED50-ICC) y las observaciones clásicas del IGN, se ha realizado un nuevo ajuste de la red ROI en ETRS89. Este ajuste, realizado en el marco de un convenio entre el ICC y el IGN, ha permitido obtener un único conjunto de coordenadas ETRS89 para Catalunya.
Las coordenadas resultado del ajuste en ETRS89 dotan a la ROI de Catalunya de una coherencia concordante con las precisiones de los métodos de observación GNSS actuales. Además, se puede considerar que los dos sistemas de referencia, ED50-ICC y ETRS89, comparten una alta coherencia, ya que comparten las observaciones.
2. Metodologías para abordar un cambio de sistema de referencia genérico
Des de un punto de vista geodésico estricto, la metodología necesaria y suficiente para abordar un cambio de sistema de referencia es la transformación de semejanza tridimensional. Así pues, dado un sistema tridimensional de coordenadas cartesianas como el de la Figura 2 (a), esta transformación se basa en los siete parámetros que muestra la Figura 2 (b). Estos siete parámetros son: tres translaciones (una para cada eje en el espacio tridimensional: ΔX, ΔY, ΔZ), tres giros (uno para cada eje en el espacio tridimensional: RX, RY, RZ) y un factor de escala (el mismo para los tres ejes en el espacio tridimensional: s).
 |
 |
(a) (b)
Figura 2: Sistema de referencia tridimensional (a) y transformación de semejanza tridimensional (b).
Suponiendo que el cambio de sistema de referencia se ha de aplicar en un espacio bidimensional (como podría ser el caso de la cartografía), la metodología planteada en el párrafo precedente se puede simplificar a una transformación de semejanza bidimensional. Así pues, dado un sistema bidimensional de coordenadas cartesianas como el de la Figura 3 (a), esta transformación se basa en los cuatro parámetros que muestra la Figura 3 (b). Estos cuatro parámetros son: dos translaciones (una para cada eje en el espacio bidimensional: ΔX, ΔY), un giro (en el plano 2D: α) y un factor de escala (el mismo para los dos ejes en el espacio bidimensional: s).
 |
 |
(a) (b)
Figura 3: Sistema de referencia bidimensional (a) y transformación de semejanza bidimensional (b).
Las dos transformaciones de semejanza descritas en los párrafos precedentes son, por definición, conformes. Esto significa que cualquier objeto que se transforme con una de estas dos metodologías no sufrirá ningún cambio en su forma, tan sólo cambiaran sus coordenadas, su orientación y su tamaño.
No obstante, en determinadas ocasiones, los sistemas de referencia antiguos se materializaron con un instrumental, unas metodologías de observación y unos procesos de cálculo que les dotaron de una precisión inferior a la de los sistemas de referencia actuales. Estas diferencias de precisión son el motivo de determinadas incoherencias o deformaciones, que los métodos de transformación conformes no permiten corregir. Es por ello que surgieron el modelado de la distorsión y las mallas de transformación, que permiten expresar transformaciones entre sistemas de referencia con incoherencias.
Así pues, dado un sistema bidimensional de coordenadas cartesianas como el de la Figura 4 (a), la malla de transformación se basa en la definición de un conjunto de nodos, para cada uno de los cuales se especifica dos translaciones en el espacio bidimensional, como se puede ver en la Figura 4 (b).
| |
 |
(a) (b)
Figura 4: Sistema de referencia bidimensional (a) y malla de transformación bidimensional (b).
El valor de estas dos translaciones se obtiene calculando la transformación (incluida la distorsión) entre los sistemas de referencia, utilizando métodos de modelado como el de mínima curvatura, la colocación o rubber-sheeting, entre otros. Una vez modelada la distorsión, sea cual sea el método escogido para su cálculo, ésta se expresa en forma de malla de transformación, NTv2 por ejemplo. El cambio de sistema de referencia canadiense de NAD27 a NAD83 o el australiano de AGD66 a GDA94 son dos ejemplos de transformaciones en base a mallas NTv2 de transformación.
Cabe remarcar que, si bien las transformaciones de malla permiten modelar las problemáticas derivadas de las incoherencias entre sistemas de referencia, también introducen deformaciones allí donde se utilizan. Éstas pueden ser simples deformaciones de los elementos transformados, pérdida de determinadas relaciones topológicas y errores propios del tipo de dato que se transforme (vector o ráster) así como de la escala del mismo.
3. Elección del modelo matemático para el ámbito específico de cartografía del ICC
Para el ámbito específico de cartografía del ICC, la coherencia entre los marcos de referencia ED50-ICC y ETRS89 es suficiente para omitir el modelado de la distorsión. Al no ser necesario aprovechar la ventajas que ofrece este modelado, se descarta su uso para el cambio de sistema de referencia y, de esta forma, también se evitan todas las problemáticas apuntadas en los apartados precedentes para este tipo de transformaciones.
Con el descarte del uso del modelado de la distorsión, la solución óptima al cambio de sistema de referencia pasa por una transformación conforme. La aplicación de la transformación tridimensional o bidimensional presenta diferencias sustanciales, como se verá a continuación, que permitirán discernir cual es la que mejor se adapta a la transformación de cartografía del ICC.
Por un lado, la transformación de semejanza tridimensional (modelo Bursa-Wolf) se aplica a elementos en el sistema de coordenadas geocéntricas. Por otro, la cartografía suele representarse en una proyección y con altitudes ortométricas. El proceso de cambio de sistema de referencia de ED50 a ETRS89 para cartografía en la proyección UTM y con altitudes referidas al nivel medio del mar en Alicante, empleando la transformación de semejanza tridimensional, se resume en base a la siguiente figura:

Figura 5: Transformación de coordenadas UTM en base a la transformación de semejanza tridimensional.
Considerando el Real Decreto 1071/2007, citado anteriormente, el sistema ETRS89 «[…] tomará como referencia de altitudes los registros del nivel medio del mar en Alicante para la Península […]». Esto significa que la cota ortométrica oficial representada en la cartografía hasta el momento no varía con el cambio al nuevo sistema de referencia. Consiguientemente, para el ámbito específico de la cartografía del ICC, el cambio del sistema de referencia de ED50 a ETRS89 puede simplificarse a la transformación de semejanza bidimensional.

Figura 6: Transformación de coordenadas UTM en base a la transformación de semejanza bidimensional.
Con el uso de la transformación de semejanza bidimensional se evitan una parte importante de los cálculos, ya que no es necesario cambiar entre coordenadas geográficas y UTM, ni entre los sistemas de coordenadas geodésicas y geocéntricas. Todo esto evita el uso de desarrollos en serie de Taylor y los cálculos sobre la superficie del elipsoide que, debido a su complejidad, pueden presentar diferencias cuando son procesados por diferentes algoritmos, afectando al resultado y a la precisión final del proceso. Además, la transformación de semejanza bidimensional permite prescindir del empleo de los modelos de geoide y elimina la intervención de la cota ortométrica en los cálculos, asegurando que la cota no sufre variación alguna.
Además, los cuatro parámetros de la transformación de semejanza bidimensional están expresados para su aplicación directa en la proyección UTM. Consiguientemente, se pueden aplicar a las coordenadas de los elementos a transformar. La transformación de semejanza bidimensional puede aplicarse en la mayoría de los sistemas CAD y GIS, ya que se puede descomponer en dos translaciones, un giro y un factor de escala. Los sistemas GIS, además, también suelen incorporar herramientas específicas para aplicar esta transformación.
En conclusión, y ante todos estos argumentos, el ICC ha optado por transformar la cartografía relativa a su ámbito utilizando la transformación de semejanza bidimensional.
4. Implementación de la transformación de semejanza bidimensional
Una vez escogido el método de transformación óptimo para el caso de la cartografía oficial en Catalunya, la transformación de semejanza bidimensional, se presenta el resultado de los cálculos realizados por el ICC para la determinación de los parámetros y la evaluación de su aplicabilidad en la cartografía.
4.1 Cálculo de los parámetros
Para el cálculo de los parámetros se han escogido los vértices de la red ROI, ya que están disponibles en ambos sistemas y tienen una distribución homogénea en el territorio. Así, se dispone de una nube de 683 puntos, que se han de ajustar al modelo matemático de la transformación de semejanza bidimensional:
 (1)
(1)
El resultado del ajuste de las coordenadas de los 683 puntos al modelo matemático de la transformación de semejanza bidimensional, permite obtener los parámetros de transformación de ED50 a ETRS89 que muestra la Tabla 1, para ser aplicados a coordenadas UTM (huso 31, hemisferio Norte).
| Parámetro | Valor |
| TX | – 129,549 m |
| TY | – 208,185 m |
| μ | 1,5504·10-6 |
| α | – 1,56504 » |
Tabla 1: Parámetros de la transformación de semejanza bidimensional ‘100800400′.
Los parámetros de esta transformación también se denominan, en base a la codificación propia del ICC, con el código ‘100800400′. Además de los parámetros, el ajuste por mínimos cuadrados permite obtener unos residuos, los estadísticos de los cuales se muestran a continuación:
|
Estadístico |
X (m) |
Y (m) |
Módulo 2D (m) |
|
Mínimo: |
-0,050 |
-0,042 |
– |
|
Máximo: |
0,038 |
0,047 |
0,065 |
|
Media: |
0,000 |
0,000 |
0,021 |
|
RMS: |
0,016 |
0,017 |
0,024 |
Tabla 2: Residuos del cálculo de la transformación de semejanza bidimensional ‘100800400′.
4.2 Evaluación de la aplicabilidad en la cartografía
Para estimar el error que puede introducir la transformación de semejanza bidimensional en la cartografía, se ha estudiado la base de datos de puntos de apoyo utilizados en la aerotriangulación de proyectos 1:1.000. Esta base de datos consta de unos 15.000 puntos distribuidos por toda Catalunya, cuyas coordenadas se expresaban en ED50-ICC. Por un lado, estos puntos se han transformado a ETRS89 mediante un reajuste de las bases respecto al nuevo marco ETRS89 y, éstas son las coordenadas que se usan ahora para las aerotriangulaciones en ETRS89. Por otro lado, con tal de conocer las discrepancias que puede introducir la transformación de semejanza bidimensional en la cartografía, se han transformado estos mismos puntos con la transformación ‘100800400′ y se han comparando con el primer conjunto reajustado.
Con este trabajo de validación aprobado en la CCCC (Comissió de Coordinació Cartogràfica de Catalunya), órgano que coordina los esfuerzos en producción cartográfica y geoinformación entre la Administración de la Generalitat de Catalunya y los entes locales, se ha oficializado esta transformación como la oficial para los productos y servicios derivados del ICC en Catalunya (consultar [3] para ampliar la información)
5. Alternativas a la transformación de semejanza bidimensional
La transformación de semejanza bidimensional presenta el inconveniente de que no todo el software puede aplicarla, ya que puede que no tenga implementado el modelo matemático de la transformación ni disponga de herramientas que permitan aplicarla. Este hecho dificulta la difusión de la transformación oficial y la implementación de la misma por parte de los usuarios de cartografía del ICC. Es por ello que se ha establecido contacto con los principales fabricantes de software solicitando la inclusión del modelo de semejanza bidimensional en sus productos.
Dado que este proceso puede prolongarse más de lo deseable para los usuarios, se han planteado alternativas en base a las mallas NTv2, y a la transformación de semejanza tridimensional, metodologías que sí suelen encontrarse disponibles en el software. Cabe remarcar, en este punto, que la transformación oficial es la que se basa en el modelo de semejanza bidimensional (apartado 5.1), y tanto la malla NTv2 como la transformación de semejanza tridimensional son aproximaciones, que difieren de la transformación oficial tal y como se muestra a continuación.
5.1 Malla NTv2 de transformación ‘100800401′
La malla NTv2, tal como tal como muestra la Figura 4 (b), es un conjunto de nodos, para cada uno de los cuales se especifica dos translaciones en el espacio bidimensional. La malla NTv2 es la forma de expresar los valores de la transformación, y estos valores han de calcularse en base a alguna metodología que, tal y como se apuntaba en el apartado 3, pueden ser la de mínima curvatura, la colocación o rubber-sheeting, entre otras.
Aunque la malla NTv2 suele estar asociada a transformaciones que absorben distorsiones, de ahí las metodologías citadas en el párrafo precedente, la malla como tal es sólo la herramienta para vehicular los valores de la transformación, y estos valores se pueden calcular con el método más adecuado a cada caso. Para el caso del ICC, y como no se quiere modelar ninguna distorsión, sino simplemente aprovechar la amplia difusión del formato NTv2, los valores de la transformación para cada nodo se calculan utilizando la transformación de semejanza bidimensional ‘100800400′. En base a la codificación del ICC antes citada, la malla NTv2 de transformación obtenida se denomina con el código ‘100800401′
Cabe mencionar que los resultados de aplicar la transformación con la malla NTv2 o con los parámetros de la Tabla 1 y el modelo de semejanza bidimensional (1) pueden presentar diferencias. En sentido estricto, la malla se ha generado con un paso de malla suficientemente denso para minimizar los errores por omisión de los procesos de interpolación, y las diferencias con la transformación de semejanza bidimensional deberían ser inferiores a 0.5 mm. No obstante, es importante destacar que la malla NTv2 se expresa en segundos sexagesimales y las coordenadas a transformar se encuentran, a menudo, en coordenadas UTM; por tanto, también se ha de considerar el error que puede introducir el proceso de conversión de coordenadas UTM a geográficas, y viceversa, en el resultado final de las coordenadas transformadas.
 |
 |
Figura 7: Malla de transformación ‘100800401′ (modelando la transformación ‘100800400′).
En conclusión, cabe remarcar que si no es posible utilizar la transformación de semejanza bidimensional ‘100800400′, la mejor aproximación que se puede utilizar es la malla NTv2 ‘100800401′, siempre considerando las diferencias que esto puede motivar.
5.2 Transformación de semejanza tridimensional ‘100800402′
En el caso de que no sea posible aplicar la transformación de semejanza bidimensional ‘100800400′ ni la malla NTv2 ‘100800401′, puede estudiarse la opción de aplicar la transformación de semejanza tridimensional. La transformación de semejanza tridimensional calculada por el ICC, también denominada con el código ‘100800402′, se expresa en el sistema de coordenadas geocéntricas, ya que las herramientas estudiadas así lo requieren en la mayoría de los casos, y el modelo matemático al que responde es:
 (2)
(2)
En este punto es importante destacar que los resultados de aplicar la transformación en base al modelo de semejanza tridimensional (2), o en base al modelo de semejanza bidimensional (1) pueden presentar diferencias. Además, el modelo de la transformación de semejanza tridimensional se expresa en coordenadas geocéntricas y las coordenadas a transformar, a menudo, se encuentran en la proyección UTM. Por consiguiente, también se ha de considerar el error que puede introducir el paso de coordenadas UTM a geocéntricas, y viceversa. En base a los algoritmos de paso de coordenadas UTM a geocéntricas que utiliza el ICC, la Tabla 3 muestra las diferencias entre la transformación ‘100800400′ y ‘100800402′.
|
Estadístico |
X (m) |
Y (m) |
Módulo 2D (m) |
|
Mínimo: |
-0,060 |
-0,039 |
– |
|
Máximo: |
0,036 |
0,014 |
0,064 |
|
Media: |
-0,020 |
-0,015 |
0,028 |
|
Desv. est.: |
0,013 |
0,007 |
0,009 |
|
RMS: |
0,024 |
0,017 |
0,029 |
Tabla 3: Diferencia entre las transformaciones ‘100800400′ y ‘100800402′.
6. Ajuste del modelo EGM2008 para Catalunya
Con la publicación del modelo gravitatorio EMG2008 por parte de la NGA (National Geospatial-Intelligence Agency) y la publicación de la REDNAP (Red de Nivelación de Alta Precisión) por parte del IGN, el ICC ha adaptado este nuevo modelo para Catalunya, abordando su interés para actualizar el geoide UB91.
Así pues, el ICC llevó a cabo una campaña de medición de la altura elipsoidal en puntos de REDANP, utilizando el servició RTKAT. En base a criterios de precisión de las medidas y distribución territorial, se seleccionaron 241 puntos. La precisión obtenida en la medida de la altura elipsoidal se hallaba alrededor de los 2.5 cm.
En base a los puntos seleccionados, y con tal de ajustar el modelo EGM08 a Catalunya, se ha determinado la altura ortométrica de los mismos utilizando el modelo global EGM08 y la altura elipsoidal observada con RTKAT. El resultado de comparar esta cota ortométrica con la de la REDNAP, marco oficial, muestra un sistematismo de 0,595 m entre ambas.
Como no se dispone de datos gravimétricos para incorporar a este modelo global, se ha decidido incorporar el sistematismo de 0,595 m como un cambio de referencia de potencial en la ondulación, obteniendo el modelo EGM08D595. Los estadísticos de las diferencias residuales de este ajuste, entre REDNAP y EGM08D595, son:
| Estadístico | ΔOH (m) |
| Mínimo: | -0,110 |
| Máximo: | 0,131 |
| Media: | 0,000 |
| Desv. est.: | 0,042 |
Tabla 4: Estadísticos de las diferencias entre la REDNAP y el modelo de geoide EGM08D595.
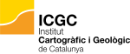
La distribución territorial de estas mismas diferencias, entre REDNAP y EGM08D595, se muestra en el mapa siguiente:

Figura 8: Distribución territorial de las diferencias entre la REDNAP y el modelo de geoide EGM08D595.
Como referencia, se comprara la determinación de la altura ortométrica de estos puntos con el geoide hasta ahora vigente, el UB91 corregido por nivelación, con la altura de la REDNAP:
| Estadístico | ΔOH (m) |
| Mínimo: | -0,166 |
| Máximo: | 0,375 |
| Media: | -0,017 |
| Desv. est.: | 0,103 |
Tabla 5: Estadísticos de las diferencias entre la REDNAP y el modelo de geoide UB91 (corregido por nivelación).
El resultado final del ajuste permite obtener un modelo de geoide para Catalunya, denominado EGM08D595. La precisión estimada de este nuevo modelo de geoide es de 4 cm (RMS), mientras que la del geoide UB91 utilizado hasta el momento, se estimaba en unos 10 cm (RMS). Esta mejora del modelo justifica la adopción de EGM08D595, también denominado ‘cat80000′, para los trabajos del ICC.
7. Plan de Comunicación y Soporte
Con el objetivo de liderar el cambio del sistema de referencia en Catalunya, el ICC está diseñando un plan de comunicación y soporte para la transición al nuevo sistema de referencia. Este plan abarca aspectos de información a la comunidad de usuarios, formación a distintos perfiles profesionales para la correcta transformación de sus productos de forma coherente a las bases del ICC, y soporte al cambio mediante herramientas y asesoría técnica.
Uno del los aspectos tratados ha sido la comunicación de la existencia de la transformación a distintos fabricantes y grupos de desarrolladores de software en el entorno de la geoinformación. Como este es un aspecto clave para la correcta implantación de la transformación, y a fin de garantizar una correcta comunicación de la misma, se ha inscrito la transformación en el registro geodésico de la OGP. Para ello se han cumplido los estándares exigidos por el EPSG Geodetic Registry obteniendo su aprobación e inscripción en el registro bajo el código EPSG:5166 de tipo ‘Coordinate Transfromation’, nombrado «ED50 / UTM zone 31N to ETRS89 / UTM zone 31N (1) «. En el registro se pueden consultar tanto los parámetros como el modelo matemático1 implementado por la OGP.
Para avanzar en la correcta implementación se ha elaborado documentación de soporte para la aplicación de la transformación mediante diferentes métodos en diversos productos comerciales GIS, CAD…; a la vez que guías de implementación en librerías y herramientas OGC como GDAL, para la utilización de la transformación en productos y servicios basados en estos proyectos.
Des de principios del mes de Febrero, ya se encuentra disponible en la web del ICC diferente información relacionada con ETRS89, como son las fichas de los vértices geodésicos de la XU, los parámetros de la transformación de semejanza bidimensional oficial ‘100800400′, así como la nueva calculadora que permite aplicarlos, y el nuevo geoide EMG08D595 con las herramientas para su interpolación.
7.1 Visitas a las entidades afectadas por el cambio
Con el cambio de sistema de referencia, una de las tareas que hay que abordar es la transformación de la cartografía y las redes geodésicas locales que se han venido utilizando hasta el momento, y que son susceptibles de seguir siendo utilizadas.
Con este objetivo, el ICC ha iniciado una campaña de reuniones con ayuntamientos y empresas que presentan problemáticas concretas, como pueden ser disponer de cartografía a escalas mayores de 1:1000, o de redes de vértices geodésicos locales desplegadas por ellos mismos. En la fase actual, se esta analizando la situación de cada caso para evaluar si es viable aplicar la solución general y se están determinando las soluciones concretas que requieren algunos de ellos. El análisis contempla la transformación de la red local y de la cartografía, así como el estudio de los efectos que puede implicar la introducción del nuevo geoide EGM08D595.
Nota:
1. El modelo matemático implementado por la OGP y el implementado por el ICC presentan dos diferencias. En primer lugar, un cambio de la parametrización del signo en el modelo matemático y, en segundo, la forma como se expresa el cambio de escala entre sistemas de referencia.
9. Referencias
http://www.rcg.cat/articles.php?id=144 [4/2/2011].