Lídar es un acrónimo de LIght Detection And Ranging. El equipo lanza pulsos láser que rebotan sobre los objetos del terreno y se registra el tiempo que tarda la señal en regresar al detector. Los equipos para barrido lídar aerotransportado (ALS, de Airborne Laser Scanning) son de orientación directa. Las coordenadas de los puntos se obtienen a partir del conocimiento preciso de la trayectoria que se obtiene mediante GPS/INS. La unidad de medida inercial registra las aceleraciones y las velocidades angulares en 3 ejes de coordenadas. Los ALS disponen además de un sistema de barrido que desvía el rayo láser lateralmente mientras el avión o el helicóptero avanza y así cubren una franja de terreno. El equipo registra el tiempo GPS, el ángulo de deflexión del rayo, el tiempo de vuelo de la señal y su intensidad. A partir del tiempo de vuelo podemos calcular la distancia inclinada al objeto sobre el cual se ha reflejado la señal. Una vez calculada la trayectoria, con el ángulo de deflexión y la distancia inclinada se calculan las coordenadas tridimensionales de los puntos sobre los que ha rebotado la señal láser (Maune, 2007).
El lídar es utilizado por el USGS con colaboración con NASA y NOAA en EEUU desde 1995 (USGS, 2009) para la monitorización periódica de sus costas. Esta técnica presenta numerosas ventajas sobre la fotogrametría para este tipo de estudios. Al tratarse de un sensor activo, puede ser operado de día y de noche y la falta de textura de la arena o la presencia del mar no comprometen la precisión de las medidas. Por el contrario, en fotogrametría suele ser difícil la visión estereoscópica en las zonas cubiertas de arena debido a la falta de textura. En la superficie del mar es imposible tener estereoscopía. Esto provoca que los pares estereoscópicos con mucha agua sean difíciles de orientar y como consecuencia los modelos de restitución pueden presentar deformaciones debido a que la distribución de los puntos de traspaso es subóptima.
Los equipos para lídar altimétrico suelen emplear un láser en el infrarrojo próximo, normalmente de 1 μm ó 1.5 μm. Sobre la superficie del agua se produce reflexión especular para estas longitudes de onda y no hay penetración en el agua. Existen equipos lídar específicos para realizar medidas batimétricas. La técnica se suele conocer por las siglas AHL del inglés Airborne Hydrographic Lidar. Emplean dos rayos láser, uno verde de 532 nm y otro infrarrojo de 1064 nm que se obtienen con una única fuente de láser de Nd:YAG y un duplicador de frecuencia. La señal verde penetra parcialmente en el agua mientras que la infrarroja rebota en la superficie. Utilizadas conjuntamente permiten determinar la posición de la superficie del agua, calcular las trayectorias de los rayos con precisión y deducir la profundidad del agua.
En la columna de agua se produce mucha más absorción y dispersión que la que se produce en el aire pero el AHL permite medir profundidades de hasta 50 m en aguas muy claras. La absorción y la dispersión varían con la concentración y el tipo de las partículas en suspensión y con la concentración de materia orgánica disuelta. Estas condiciones varían mucho de un lugar a otro, con la estación del año, el estado de las mareas y la meteorología. Para evaluar la transparencia del agua de una manera sencilla se utiliza el disco de Secchi. Es un disco de unos 20 cm de diámetro sujeto a una cuerda que se sumerge en el agua hasta que deja de ser visible. La profundidad a la que esto ocurre se denomina profundidad de Secchi (ps). La profundidad que alcanzará el lídar será entre 2 y 3 veces la profundidad de Secchi. El factor multiplicativo depende de si el fenómeno dominante es la absorción o la dispersión de la luz. Si domina la absorción el factor tiende a 2 y si domina la dispersión el factor tiende a valer 3.
En la superficie del agua se produce una reflexión parcial de la señal y hay dispersión en toda la columna de agua. Debido a la dispersión, el tamaño del área iluminado por un pulso láser aumenta mucho con la profundidad p y la energía se distribuye en un área grande. El reflejo del fondo se tiene que distinguir de la energía reflejada por la superficie y por la columna de agua. La detección del fondo es muy compleja y se realiza mediante complejos programas en post-proceso. La señal rebotada se muestrea y se analiza con programas específicos para discriminar qué parte de la señal corresponde a reflexión de la superficie, cuál corresponde a dispersión en la columna de agua y cuál a reflejo del fondo. Hay que distinguir entre señales que se diferencian en hasta 6 órdenes de magnitud y que se reciben en un intervalo de tiempo de decenas o centenas de nanosegundos. La cantidad de energía que alcanza el fondo varía mucho con la profundidad.
Experiencias del ICC
El ICC adquirió en noviembre de 2001 su primer equipo para ALS. Era un Optech ALTM 3025 con una frecuencia de pulsos de 25 kHz y grabación de primer y último eco. Este instrumento estuvo en producción hasta finales de 2007. En 2008 fue adquirido un Leica ALS50 phase II con capacidad de múltiples pulsos en el aire (MpiA) que alcanza una frecuencia de 150 kHz y puede recoger hasta 4 ecos por cada pulso emitido. Con el primer equipo se realizaron un gran número de proyectos entre los cuales destacan la planificación de espacios fluviales de Cataluña (PEFCAT), el modelo del terreno del territorio histórico de Guipúzcoa, los modelos de aeropuertos para AENA y el modelo de la costa de la Región Emilia-Romagna (Italia) y se inició el proyecto LidarCat para cubrir toda Cataluña con lídar. Dentro de PEFCAT, se realizó el modelo del terreno del Delta del Ebro en 2004. En 2008 y ya con el ALS50-II se ha volado por segunda vez toda Guipúzcoa y se está completando LidarCat.
Detección y evaluación de cambios entre dos épocas. Ejemplo de la playa del Bogatell de Barcelona
Si hacemos captura lídar en dos épocas distintas podemos detectar y medir los cambios entre estas dos épocas. Pueden ser cambios del terreno o cambios de los objetos sobre el terreno. Es muy sencillo medir los volúmenes de arena desplazada y los cambios de los edificios o de la vegetación. Para cada época podemos medir la superficie ocupada por la vegetación, edificios, playa, etc. y detectar construcciones dentro de un área de protección. El lídar permite una gran automatización de estos procesos. Un ejemplo de lo que se puede obtener es el estudio de los desplazamientos de arena en las playas de Barcelona (Ruiz & Kornus, 2003).
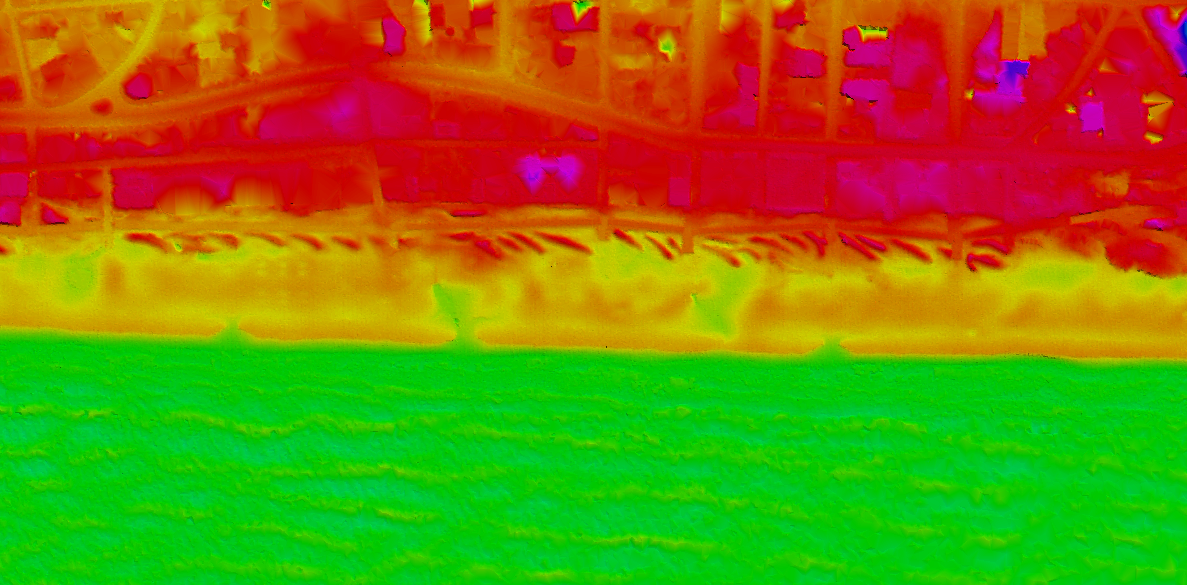
Durante los primeros meses de 2002 se produjeron fuertes lluvias en Barcelona que provocaron una erosión notable de las playas del municipio. El día 17/4/2002, poco después de una tormenta, se volaron tres pasadas que cubrían unos 8.8 km de costa desde el puerto hasta la desembocadura del río Besós con el ALTM3025. El 23/7/2002 se realizaron dos pasadas más de la misma zona, después de la regeneración artificial de la playa. Las figuras 1 y 2 muestran los modelos en la playa del Bogatell, de unos 500 m de longitud, donde se produjeron los cambios más importantes. En cada uno de los vuelos se obtuvo una densidad aproximada de 1 punto/m2 y a partir de estos datos se generaron modelos del terreno (MDT) de malla regular de 1 m de paso. Al tratarse de un lídar infrarrojo, sólo se pudieron obtener las diferencias de la arena emergida. Los parámetros de configuración del equipo se indican en la tabla 1.
| Altitud sobre el terreno | 2300 |
| Velocidad (nudos) | 120 |
| Frecuencia de pulsos (Hz) | 25000 |
| Frecuencia de barrido (Hz) | 42 |
| Divergencia (mrad) | 0,2 |
| Ángulo de barrido (o) | 10 |
| Anchura de pasada (m) | 402 |
| Tabla 1: Parámetros de configuración |

Figura 1: Playa del Bogatell el 17/4/2002.

Figura 2: Playa del Bogatell el 23/4/2002.
 |
 |
Figura 3: Diferencia de modelos.
A partir de estos MDT se generó el modelo de diferencias (figura 3) y se calcularon las diferencias de volumen y de superficie de playa (tabla 2). Vemos que para regenerar la playa se desplazaron 4.320 m3 de arena emergida de un lugar a otro y que la aportación neta de arena fue de 19.564 m3. El aumento neto de superficie fue de 11.843 m2. La línea de costa se dibujó manualmente a partir de los puntos lídar (figura 4). Todavía no disponemos de un buen algoritmo para obtener la línea de costa automáticamente. Tampoco es automática la clasificación de los puntos pertenecientes al agua.
| Diferencia de ovlumen positiva | 23.884 m3 |
| Diferencia de volumen negativa | 4.320 m3 |
| Diferencia de superficie positiva | 12.082 m2 |
| Diferencia de superficie negativa | 239 m2 |
| Tabla 2: Diferencias en volumen de area y superfície de playa |

Figura 4: Cambios de la línea de costa.
Estudio de la costa de la Región Emilia-Romagna
Este estudio fue un encargo realizado por el Servicio Geológico, Sísmico y del Suelo (SGSS) de la Región Emilia-Romagna, Italia, y forma parte de un programa de gestión integrada de la zona costera de la región y del proyecto PlanCoast del INTERREG III B Cadses. La franja costera soporta una fuerte presión antrópica. Es una de las zonas más turísticas del país y, a la vez, está muy industrializada. Está afectada por subsidencias, erosión de las playas, inundaciones por temporales e intrusión de agua salada en el acuífero. El riesgo sísmico es medio. Una parte de la llanura está situada por debajo del nivel del mar y es por tanto muy vulnerable frente a inundaciones y terremotos. La región es geológicamente muy compleja y la información recopilada se ha constituido en un SIG que en el futuro estará accesible al público.
| Altitud sobre el terreno (m) | 2300 |
| Velocidad (nudos) | 120 |
| Frecuencia de pulsos (kHz) | 25 |
| Frecuencia de barrido (Hz) | 22 |
| Divergencia (mrad) | 0.2 |
| Ángulo de barrido (o) | 20 |
| Anchura de pasada (m) | 811 |
| Solapamiento (%) | 50 |
| Tabla 3: Parámetros de configuración |
El ICC participó con la generación en 2004 de un DTM y un modelo digital de superficie (DSM) lídar de una franja de unos 800 m de anchura y de unos 125 km de longitud entre el río Po y Rimini. En total, en 4 días de vuelo con 49 pasadas se cubrieron unas 9524 Ha con una densidad de 1 punto/m2. Estos datos se han utilizado para clasificar las dunas y para cartografiar las barreras de protección situadas a unos 200 m de la costa y paralelas a ésta. También se han utilizado para realizar simulaciones de inundaciones que podrían ser provocadas por tempestades (Ciavola et al. 2006, Perini et al. 2006).
El proyecto lídar de la costa catalana
En 2006 se inició el proyecto de levantamiento lídar de toda Cataluña (LidarCat) con una densidad de 0.25 puntos/m2. Se espera completar la primera cobertura en 2009. En 2007 se inició una captura de datos específica de la costa que se espera poder repetir cada año. Con el nuevo ALS50-II se puede cubrir una franja de 1200 m con una única pasada para obtener una densidad superior a 1 punto/m2 y una precisión de 10 cm en cota. La productividad del nuevo sensor es muy superior a la del antiguo ALTM3025 pues podemos triplicar la anchura de la pasada manteniendo la densidad de puntos en el terreno.
Como parte del proyecto LidarCat, la franja costera entre Sitges y el Delta del Ebro fue cartografiada en 2006 y en 2007 se capturaron datos desde Mataró hasta Port Bou. En 2008 se completaron los bloques de costa. Como parte del levantamiento específico de la costa se capturaron datos en 2007 desde el Delta del Ebro hasta el Llobregat (42 pasadas en 4 sesiones de vuelo y unos 240 km lineales de costa). En 3 sesiones de vuelo realizadas los días 16 y 25 de octubre y 3 de noviembre de 2008 se cubrió casi completamente toda la costa catalana con una densidad de 0.5 puntos/m2.
| Altitud (m) | 2250 |
| Densidad media (puntos/m2) | 0,5 |
| Frecuencia de pulsos (kHz) | 88000 |
| Ángulo de barrido (o) | 56 |
| Anchura de pasada (m) | 2400 |
| Velocidad (nudos) | 140-165 |
| Tabla 4: Parámetros del vuelo de la costa catalana con ALS50-II |
El 26 de diciembre de 2008 se produjeron fuertes temporales con efectos severos sobre nuestras playas y paseos marítimos. Entre los días 17 y 28 de enero de 2009 se volvió a volar la mayor parte de la costa desde Barcelona hasta Lloret de Mar en un vuelo combinado con fotografía digital DMC y con una densidad de 1.2 puntos/m2. Las imágenes están disponibles a través el servicio ortoXpres del ICC: http://www.ortoxpres.cat/ Comparando los modelos del terreno que se obtienen a partir de cada uno de estos levantamientos podemos cuantificar los desplazamientos de la arena emergida en la mayor parte de la costa. Para la playa del Bogatell los cambios de volumen de arena emergida y de superficie debidos al temporal de diciembre fueron los siguientes:
| Volumen perdido | 10.181 m3 |
| Volumen ganado | 4.716 m3 |
| Superficie perdida | 16.511 m2 |
| Superficie ganada | 9.757 m2 |
| Tabla 5: Diferencias en volumen de arena y superficie de playa |
La gran precisión de los modelos del terreno que se obtienen permite medir en gabinete diferentes parámetros para la caracterización morfológica de las playas y dunas y hace innecesaria la captura de perfiles con GPS directamente en el campo (Figura 6).

Figura 5. Cambios de la playa del Bogatell con el temporal de diciembre de 2008

Figura 6. Cordón dunar en Castelldefels.
Batimetría de Mataró
El ICC realizó una prueba de AHL en colaboración con la compañía sueca Admiralty Coastal Surveys AB en 2006. El instrumento utilizado fue el Hawk Eye II que voló el 18 de marzo frente a la costa de Mataró, a unos 20 km al N de Barcelona. Se realizaron 6 pasadas paralelas de unos 14.5 km de longitud más una transversal de comprobación. Se cubrieron en total 690 Ha.
A partir de los puntos capturados con una densidad de 0.3 puntos/m2 se generó un modelo batimétrico de 2 m de paso de malla y un modelo topográfico. Estos últimos tenían una densidad de 3.7 puntos/m2. La profundidad máxima medida fue de 23 m frente a El Masnou en una zona con fondo de arena. No se llegó a evaluar la transparencia del agua con el disco de Secchi porque llovió inmediatamente después de la campaña de AHL y las lluvias alteraron la transparencia del agua. Sí que se pudieron comparar los resultados del lídar batimétrico con unos puntos medidos con ecosonda procedentes de una campaña realizada en 1992 por la Direcció General de Pesca Marítima de la Generalitat de Catalunya para delimitar el área de distribución de Posidonia oceanica. Los puntos de ecosonda están clasificados como pertenecientes a arena, roca o posidonia. Veinticinco de estos puntos estaban situados sobre las pasadas de lídar y a profundidades entre 6 y 8 metros. El error sigma de las diferencias fue de 17 cm aunque hubo una diferencia sistemática de 45 cm cuyo origen no ha podido ser establecido. Esta precisión sigma de 17 cm es consistente con la precisión esperada teórica. Se supone que debido a la refracción en la columna de agua hay una incertidumbre de 0.32 m RMS por cada 10 m de profundidad.
| Altitud (m) | 200 |
| Densidad (puntos/m2) | 0,3 batimétrico |
| 3,7 topográfico | |
| Frecuencia de pulsos (kHz) | 4 batimétrico |
| 64 topográfico | |
| Número de pasadas | 6+1 |
| Anchura de pasada (m) | 105 |
| Solapamiento entra pasadas (%) | 30 |
| Velocidad (nudos) | 149 |
| Tabla 6: Parámetros de la campaña AHL de Mataró. |
El lídar batimétrico permite trabajar en zonas que resultan peligrosas para los barcos porque tienen poca profundidad, rocas emergidas o fuertes corrientes. La anchura que cubre la sonda multihaz es proporcional a la profundidad del agua y se hace muy pequeña en aguas poco profundas. La consecuencia es que la información batimétrica para profundidades inferiores a 6 m es muy escasa.
Se pueden cartografiar 25-50 km2/h y se considera más económico que la sonda multihaz para profundidades inferiores a 12-15 m pues la anchura de la pasada es de 100 ó 200 m e independiente de la profundidad. Con Haw Eye II se pueden cubrir unos 100 km2 diarios si se realizan 2 sesiones de vuelo diarias.
Conclusiones
Tanto el lídar aerotransportado como el lídar batimétrico son técnicas consolidadas muy precisas y con una gran productividad.
El lídar topográfico resulta muy económico en el cartografiado de costas pues con muy pocas pasadas se puede cubrir toda el área de interés. Esto permite la repetición periódica de los levantamientos y la monitorización de cambios en la costa. El lídar no se ve afectado por los problemas que encuentra la fotogrametría en las zonas de costa. La falta de textura de la arena o la presencia de masas de agua no afectan a la precisión del lídar.
El lídar batimétrico es una técnica complementaria de la sonda multihaz. Es adecuado para profundidades de hasta unos 15 m. Para profundidades mayores la sonda multihaz resulta más económica y si son mucho mayores, el lídar deja de funcionar. La región de aguas poco profundas es la más interesante tanto para navegación como para gestión de costas y el lídar batimétrico puede solucionar la falta de datos en esta franja más próxima a la costa.
El lídar proporciona directamente coordenadas 3D de los puntos medidos. Esto permite una gran automatización de la clasificación de los puntos y de la detección y evaluación de cambios tanto del terreno como de los objetos situados sobre él, tales como edificios o vegetación.
Bibliografía
- Ciavola P., Perini L., Luciani P. y Armaroli C., 2006. An application of terrestrial lidar surveys for the evaluation of dune erosion generated by storm events. 5th European congress on regional geoscentific cartography and information system, Barcelona, Spain, june 13th/16th 2006, pp. 540-542.
- Irish J.L., McClung J.K. y Lillycrop W.J. Airborne Lidar Bathymetry: The SHOALS System. PIANC Bulletin, No. 103-2000, 43-53.
- Kornus W., Ruiz A., 2003. Strip Adjustment of LIDAR Data. V Semana Geomática de Barcelona. 11.2.03 al 14.2.03, Barcelona.
- Guenther, G.C., 2007 in Maune, D. Digital Elevation Model Technologies and Applications: The DEM Users Manual, 2nd Edition. ASPRS, 2007, pp. 253-320.
- Perini L. y Ubaldo C., 2006. Tools supporting coastal management in Emilia-Romagna (Italy): The coast information system and new monitoring programs (LIDAR & SAR). 5th European congress on regional geoscientific cartography and information system, Barcelona, Spain, June 13th/16th 2006, pp. 524-526. http://www.regione.emilia-romagna.it/geologia/lang/sgss_es.htm
- Ruiz A., Kornus W., 2003. Experiencias y aplicaciones del lídar. V Semana Geomática de Barcelona. 11.2.03 al 14.2.03, Barcelona.
- Schultz-Zehden A., Gee K., Scibior K. Handbook on Integrated Maritime Spatial Planning. http://plancoast.eu/files/handbook_web.pdf (consultado el 5-jun-2008).
- USGS 2009, Decisión Support for Coastal Science and Management. http://ngom.usgs.gov/dsp/mapping/coastal_lidar_data.html (consultado 7-jun-2009).